多点通信
固定翼飞行器教程
第一次设置
地面站/驱动安装
加载固件
在线烧录固件
烧录本地固件
地面站连接及使用
mission planner
连接地面站
飞行数据
飞行计划
航点命令和事件
配置/调试
CUAV Hfight
系统组成
组装飞行器
硬件设置和校准
2.遥控器校准
3.GPS罗盘校准
4.加速计校准
5.飞行模式设置
6.PM模块设置
7.ESC电调校准
机身安装指南
Rudder inspection
第一次飞行
飞行模式介绍
MANUAL 自动模式
STABILIZE简单增稳模式
FBWA线性A增稳模式
FBWB线性B增稳模式
AUTO自动模式
RTL返航模式
LOITER定点模式
Acro特技模式
Cruise巡航模式
Circle绕圆模式
Guided指导模式
Takeoff起飞模式
Land降落模式
Pre-arm报错信息分析
解锁和上锁
飞机启动及校准
失控保护
遥控器失控保护
电池保护
GCS地面站丢失保护
EKF / DCM Check Failsafe
简单电子围栏
多边形围栏
碰撞撞击保护
飞行特性
自动起飞
自动降落
反向飞行
预防失速
地理围栏
地形跟随
输出通道
飙升
高级配置
辅助功能开关
指南针设置(高级)
扩展卡尔曼滤波器(ekf)
地面效应补偿
重置参数
RC输入通道映射
RC输出映射
传感器位置补偿
传感器测试
遥测或串口设置
UBlox gps配置
电子控制的低高度限制
can总线设置
uavcan设置
任务规划
航点命令和事件
日志概述和分析
闪存日志分析
诊断硬件问题
遥测日志分析
可选硬件
数传遥测模块
数传连接CUAV HFight
数传连接mp地面站
xbee/xtend/sx数传
xbee/xtend调试
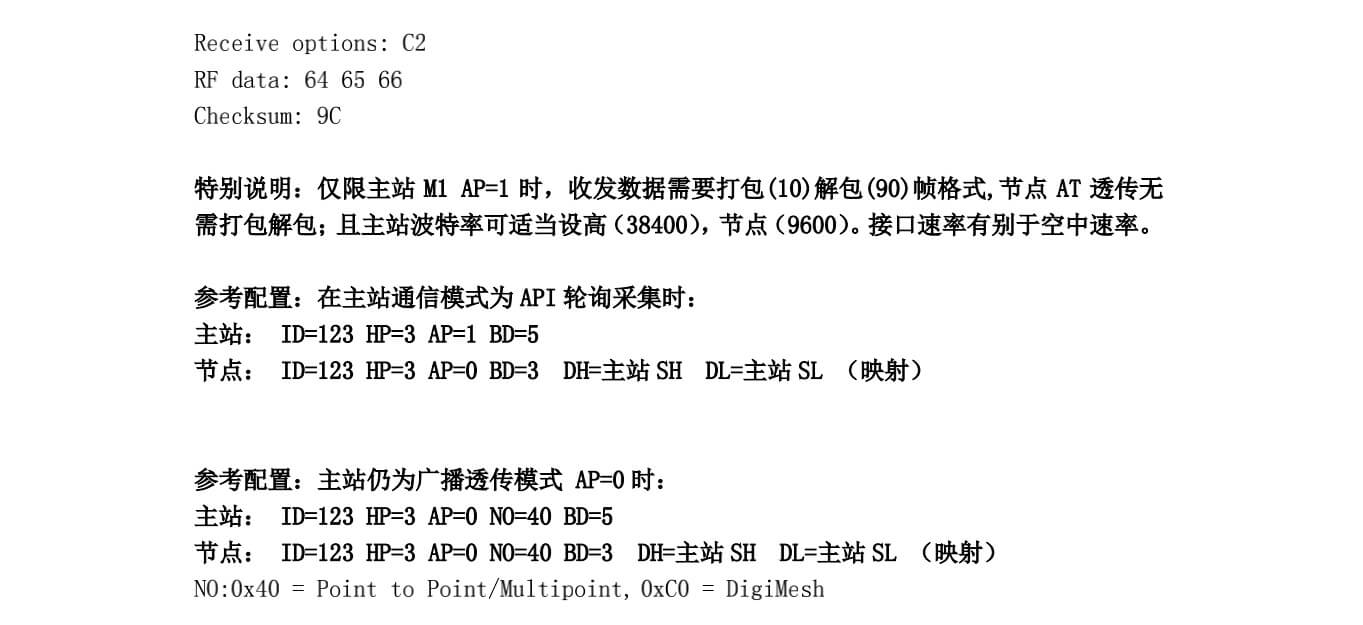
点对点通信
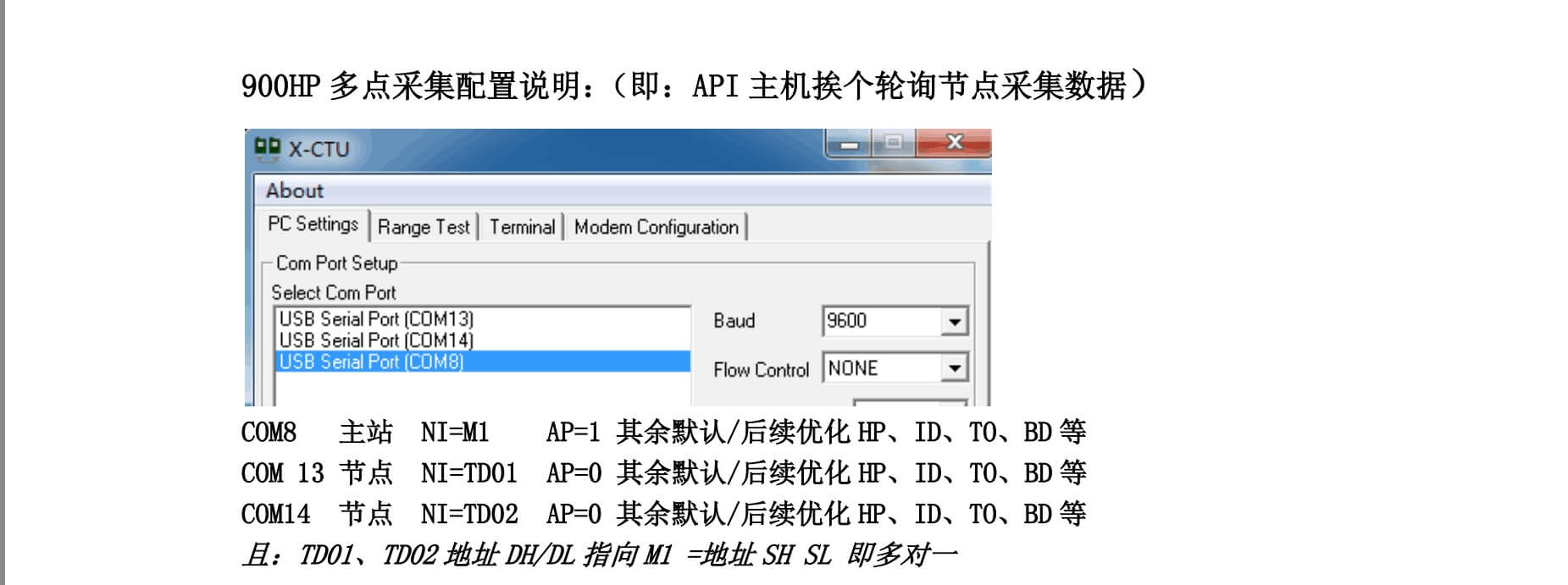
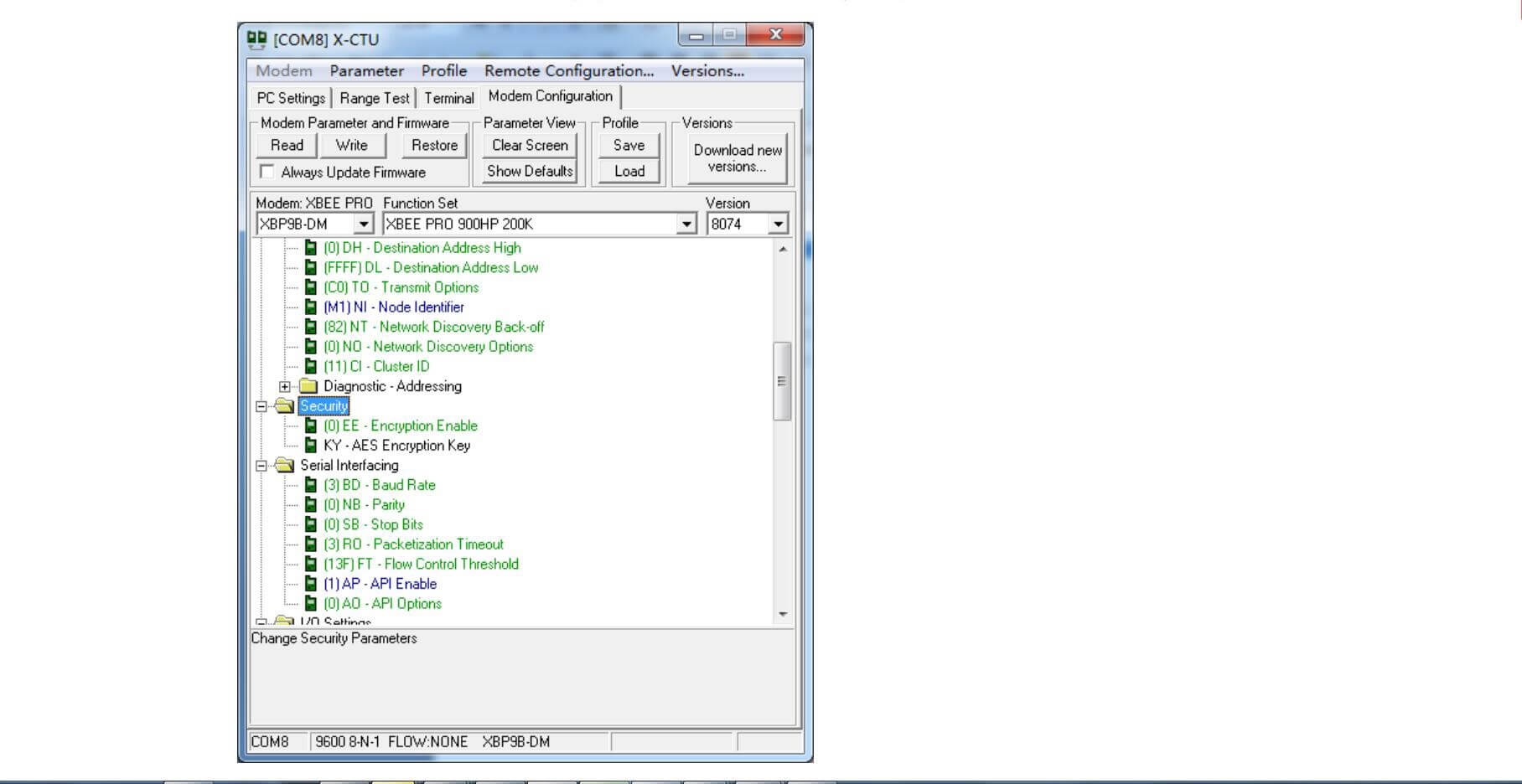
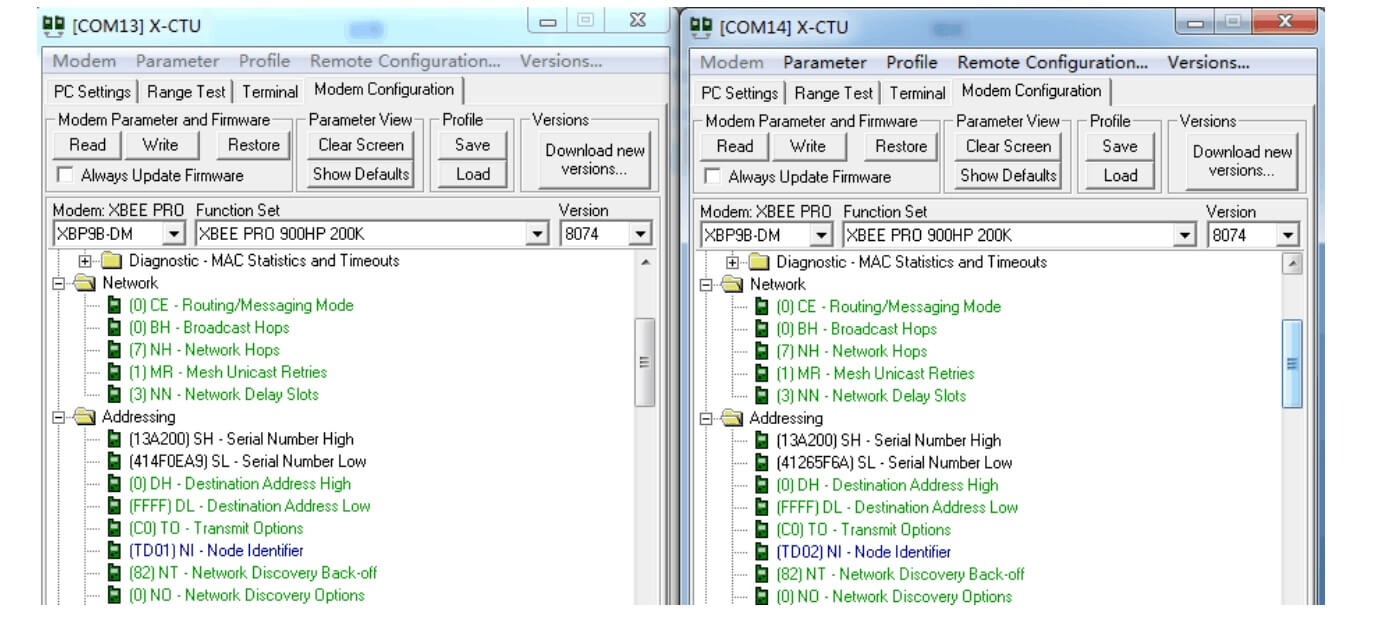
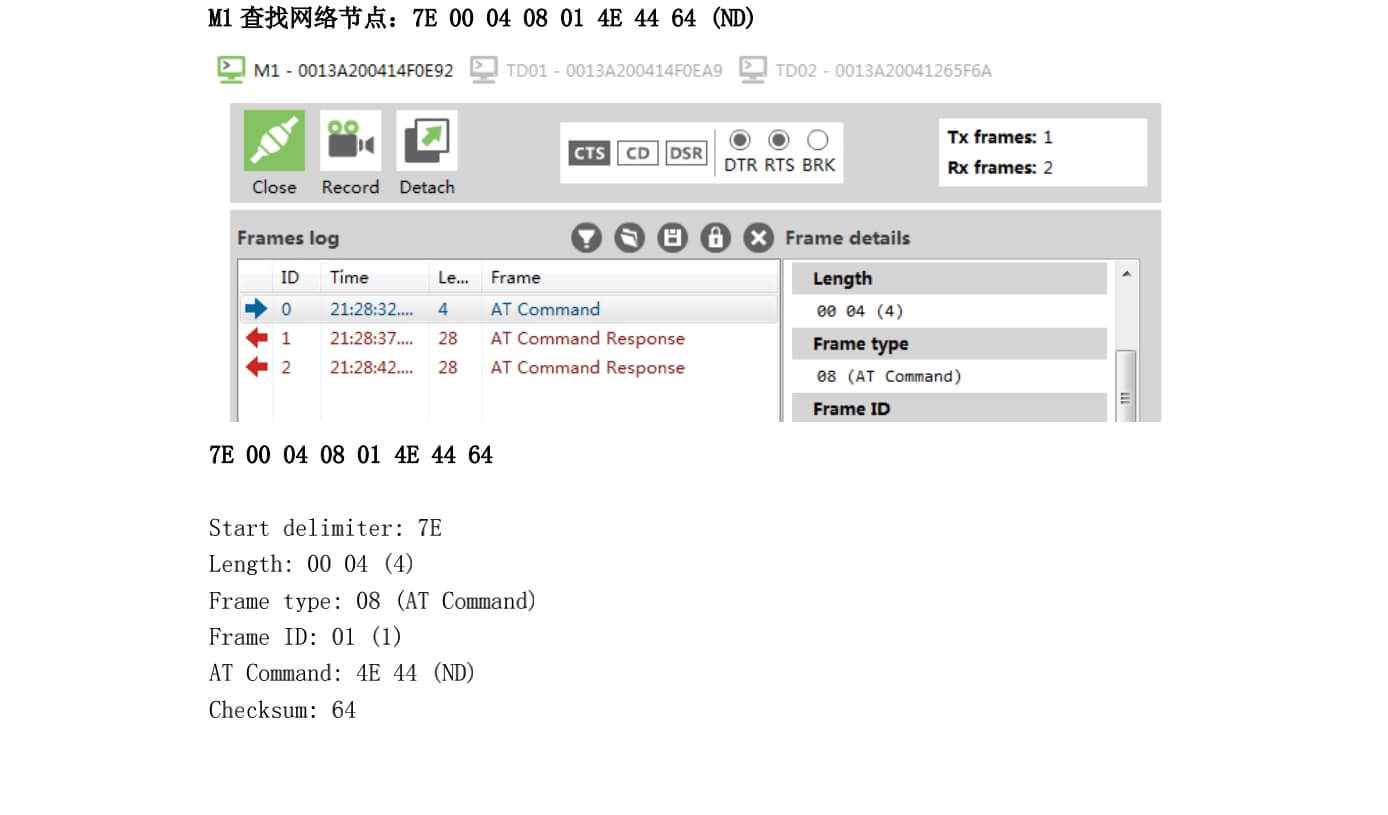
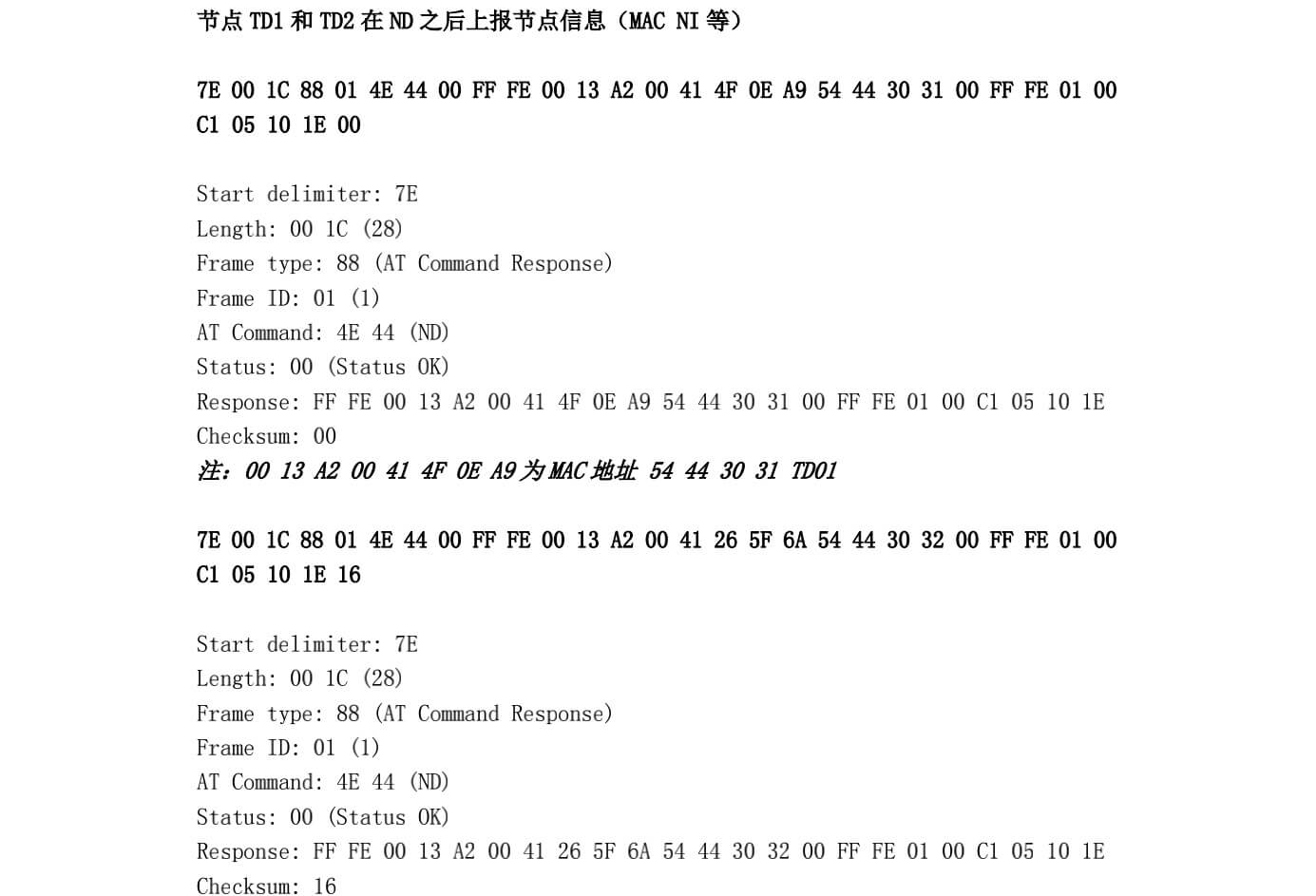
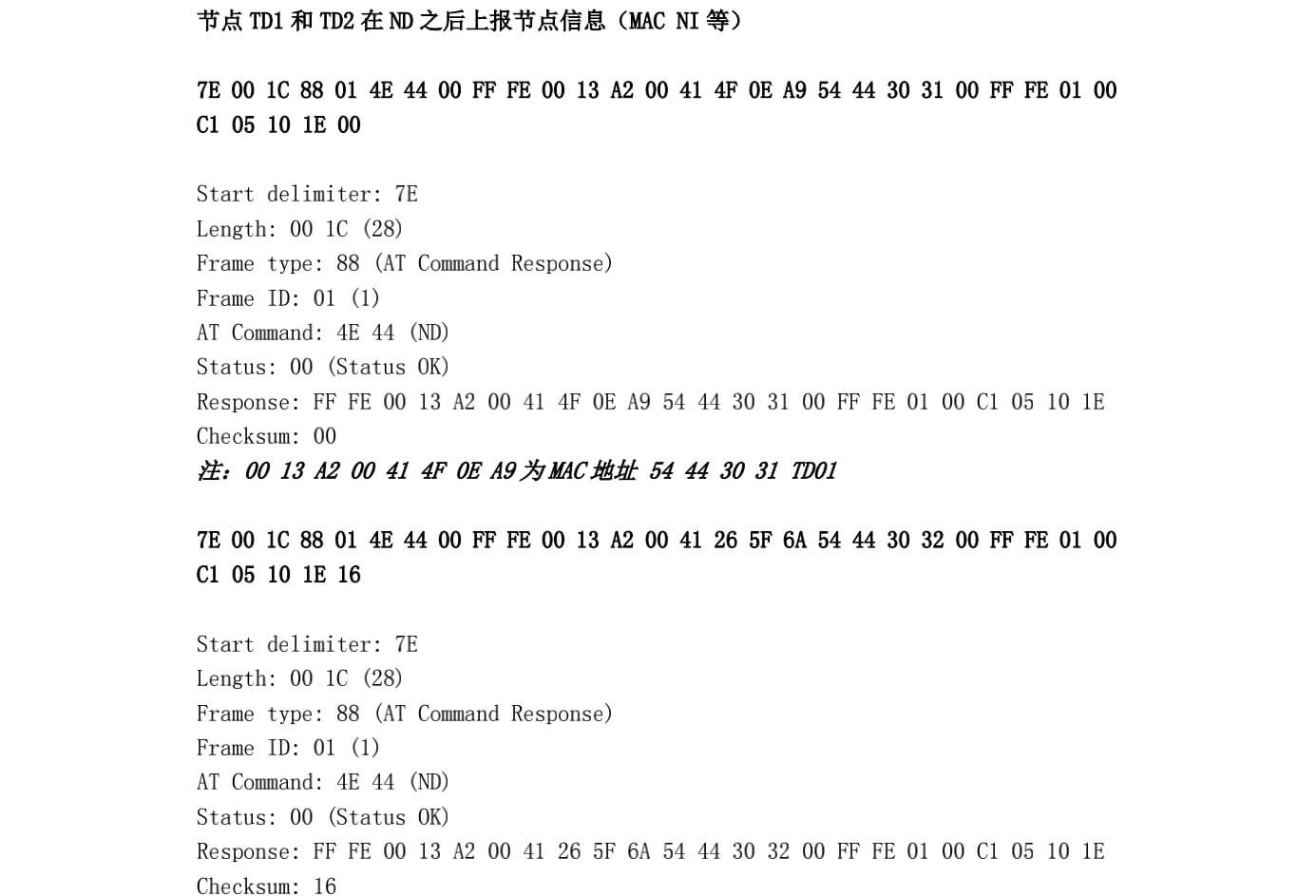
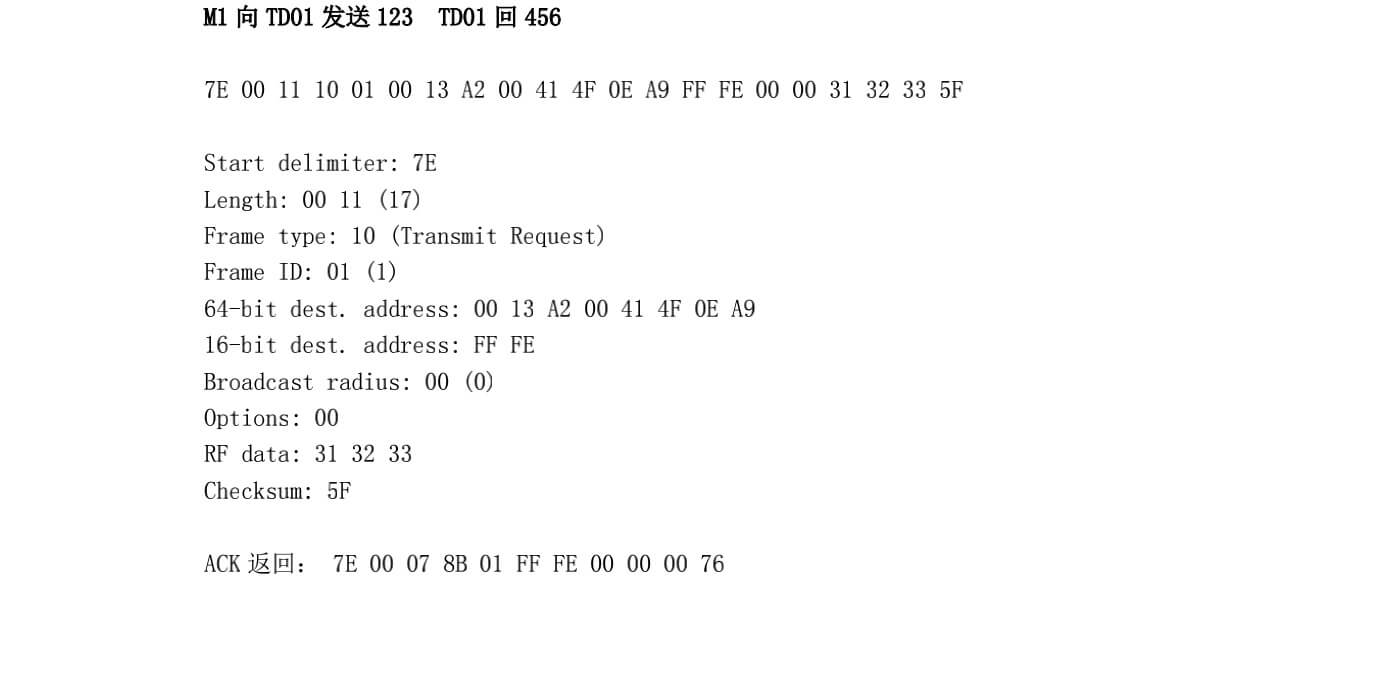
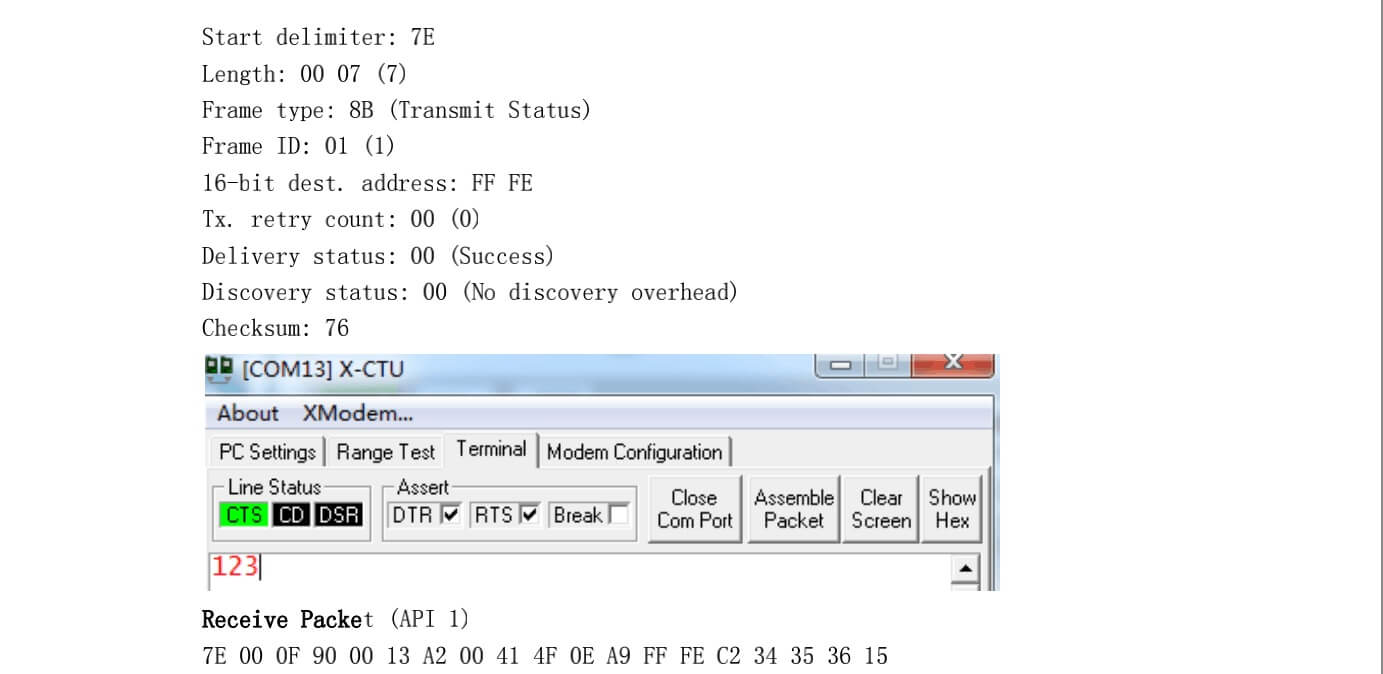
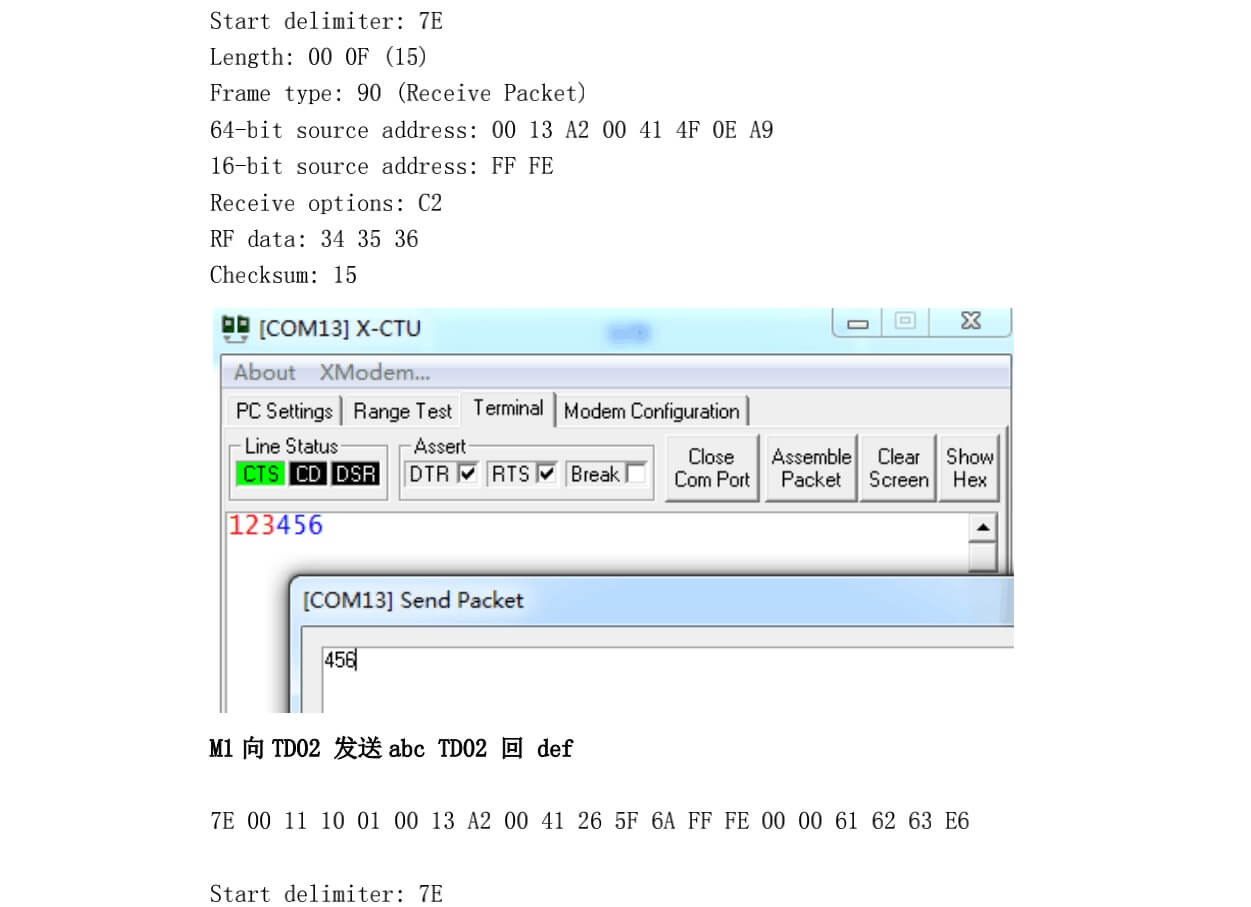
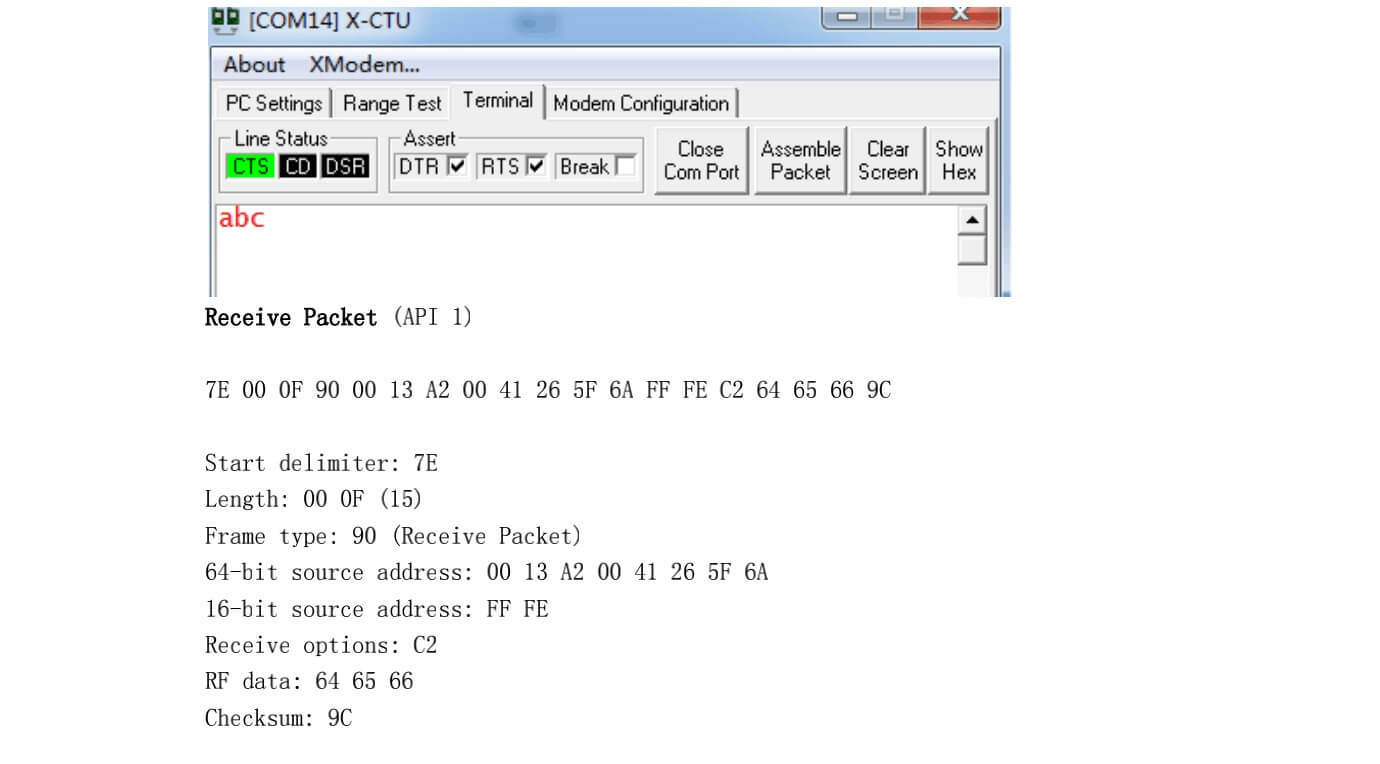
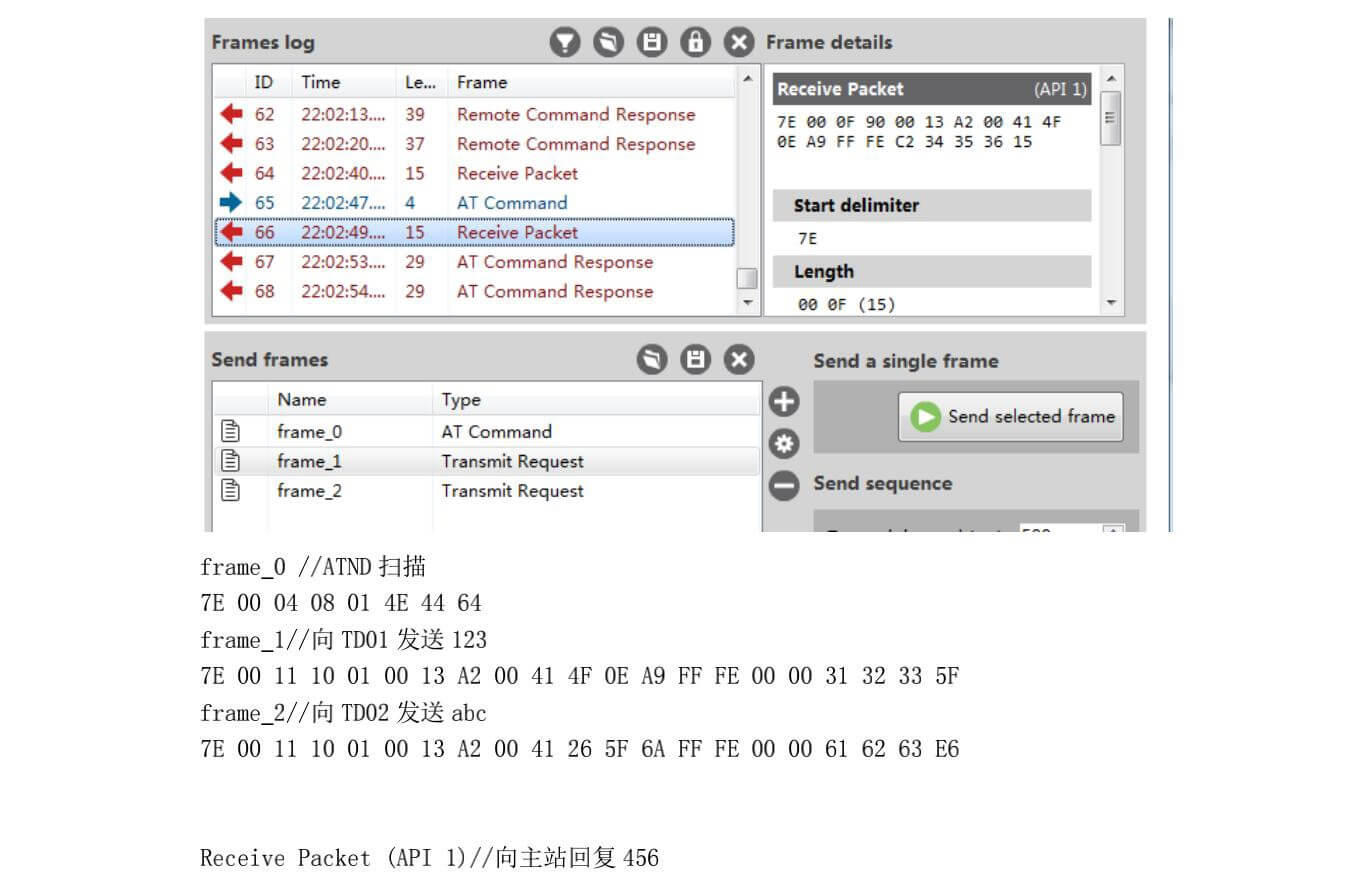
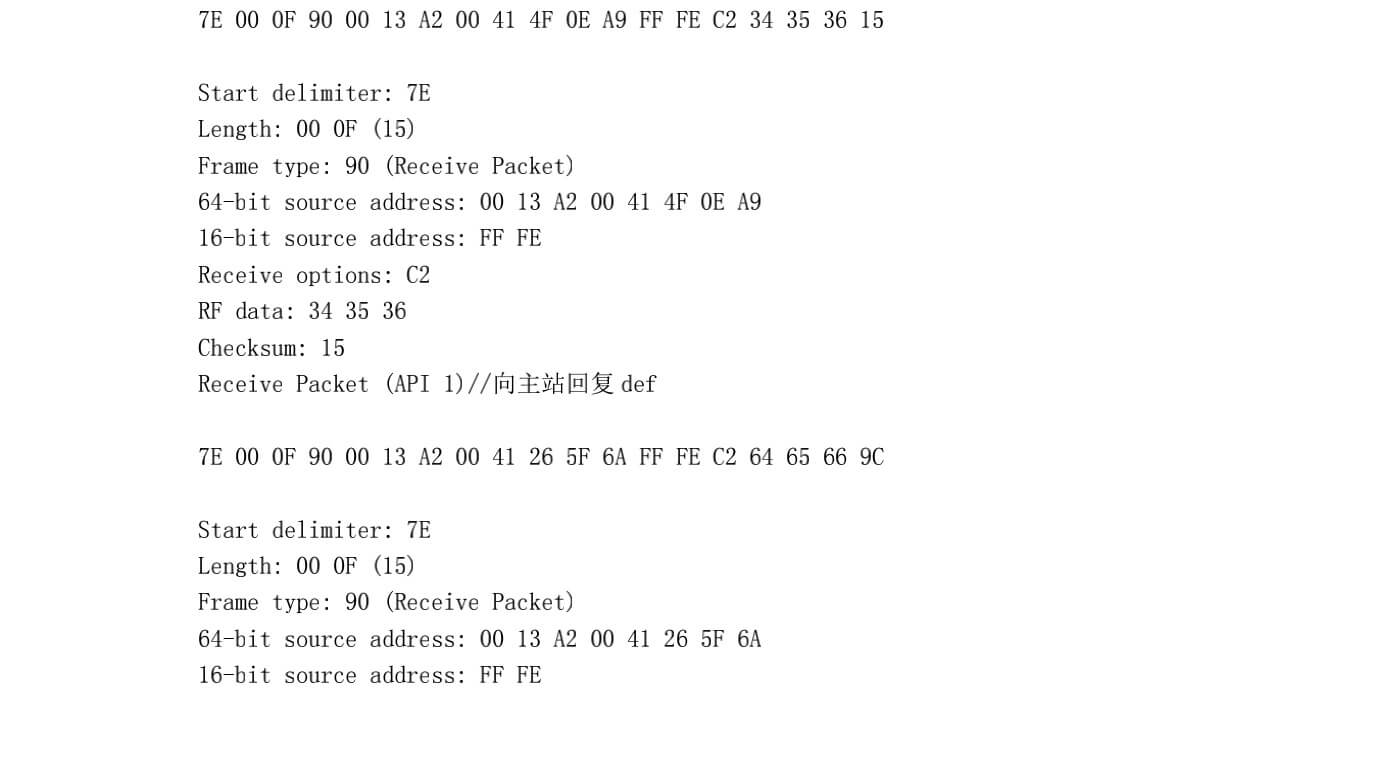
多点通信
修改波特率及ID
xbee模块强制恢复固件
3DR数传
3dr数传故障排除教程
3DR数传调试教程
3dr数传使用教程
数传图传一体链路
模拟图传
电压电流计
PM电源模块
HV_PM高电压电源模块
CPBD高压分电板
GPS定位系统
ublox gps模块
rtk 差分gps
安全开关和蜂鸣器
PPM编码器
继电器开关
RSSI信号强度指示
相机云台
相机云台
快门触发
CAN通信电调
外置led
空速计
降落伞
OSD
故障排除指南
SITL模拟器
![]/assets/duo13.jpg)
results matching "
"
No results matching "
"